
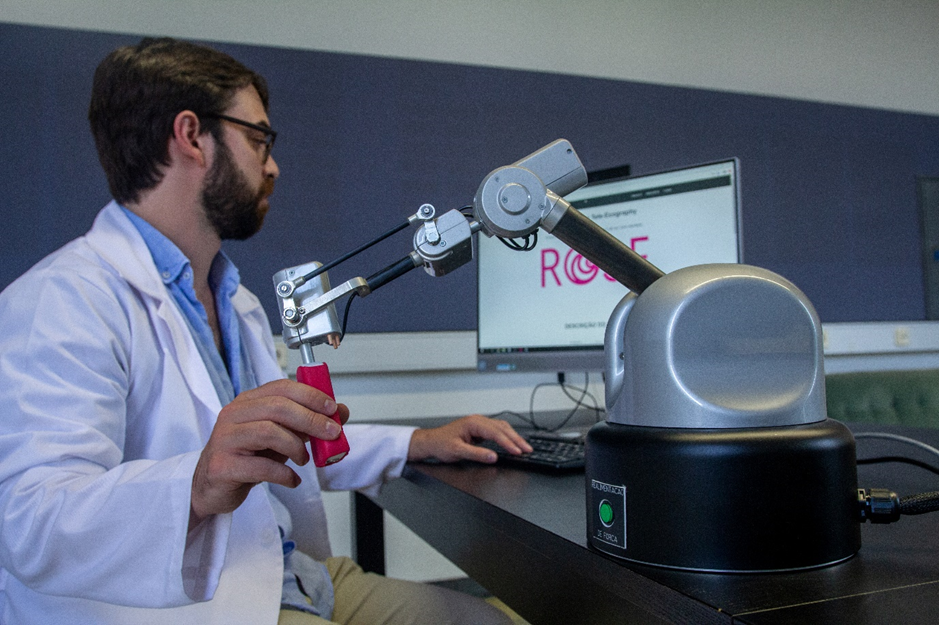
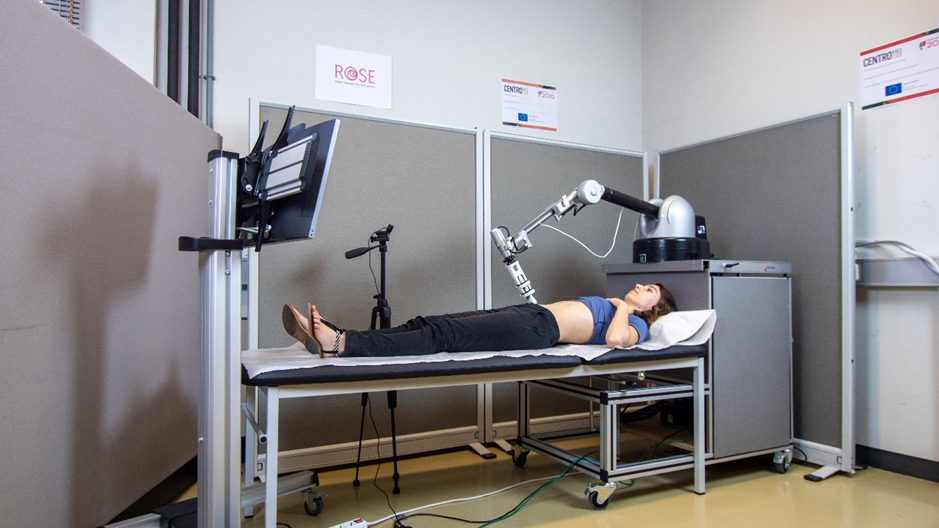
O sistema ROSE, acrónimo para Robot Sensing for Tele-Echography, é uma solução tecnológica inovadora que permite procedimentos de diagnóstico por ultra-sons abdominais e pélvicos numa configuração completamente remota. O sistema é composto por uma rede de estações de trabalho de pacientes e clínicos, equipadas com robôs ultraleves colaborativos. Através da estação de trabalho do clínico, o radiologista pode controlar remotamente a sonda de ultra-sons no lado do paciente, e devido a uma arquitectura de controlo complacente, receber na sua estação de trabalho feedback táctil, fonte de informação crítica para optimizar o desempenho em imagens de ultra-sons. Na estação de trabalho do paciente, ao lado do braço manipulador, existe um sistema de visão por computador, que alimenta a interface web clínico-paciente, permitindo a tele-consulta e proporcionando uma melhor sensação de imersão para o clínico e de presença para o paciente.
Esta tecnologia visa fornecer uma ferramenta remota eficiente para o planeamento médico, reduzindo consultas e viagens desnecessárias tanto de médicos como de pacientes. Tal eficiência permitirá aos médicos realizar exames de ultra-sons de longa distância, poupando tempo e recursos, e criando um novo paradigma de cuidados de saúde. Mesmo para pacientes com doenças crónicas, a monitorização e orientação à distância permitem-lhes viagens curtas, melhorando o conforto e reduzindo custos. Nos países em desenvolvimento, permite que os hospitais tenham acesso a especialistas nos países desenvolvidos para procederem a exames de longa distância sem preocupações de viagem.
Os conceitos e tecnologia de base implantados neste sistema tiveram as suas raízes no meio académico. O trabalho base para as arquitecturas de controlo e o software implantado no ROSE tem vindo a ser desenvolvidos há uma década através de investigadores da Universidade de Coimbra (UC) através do Instituto de Sistemas e Robótica (ISR-UC), em sistemas robóticos complacentes com controlo de torque e com visão por computador, para aplicações no setor da saúde. Através da formulação dos conceitos tecnológicos e sua validação em numerosas provas experimentais, esta tecnologia atingiu um grau de maturidade suficiente para se avançar para a fase seguinte do processo de transferência de tecnologia.
A criação do protótipo do sistema e validação em ambiente relevante, foi levada a cabo durante o projecto ROSE, um projecto co-financiado a nível nacional no âmbito do programa Portugal 2020. A este projecto juntaram-se diferentes parceiros: ISR-UC forneceu as bases do conhecimento adquirido na investigação científica; Instituto Pedro Nunes (IPN) através do Laboratório de Automática e Sistemas (LAS) forneceu apoio técnico para a implementação e integração do sistema ROSE; Luz Saúde forneceu a necessidade, meios e configuração para validação e os conhecimentos médicos para complementar o processo de engenharia; Sensing Future Technologies (SFT) forneceu apoio técnico e os canais para a comercialização futura do produto final ROSE.
Após o encerramento do projecto, o sistema ROSE foi implantado num hospital em Portugal, durante um ano. Isto permitiu a recolha contínua de dados para a validação do sistema no ambiente de trabalho e cobrir o cenário de uso prático da realização de tele-ultrasons utilizando o sistema robótico teleoperado. Este hospital envolvido na validação ROSE utilizará a tecnologia na sua própria prática, assim que a validação clínica estiver concluída. Esta operação irá gerar receitas para o hospital, de uma forma semelhante à dos ultra-sons clássicos, o que deverá ser suficiente para cobrir o contrato de manutenção com a SFT. Portanto, além de um parceiro, é também o primeiro cliente principal do sistema.
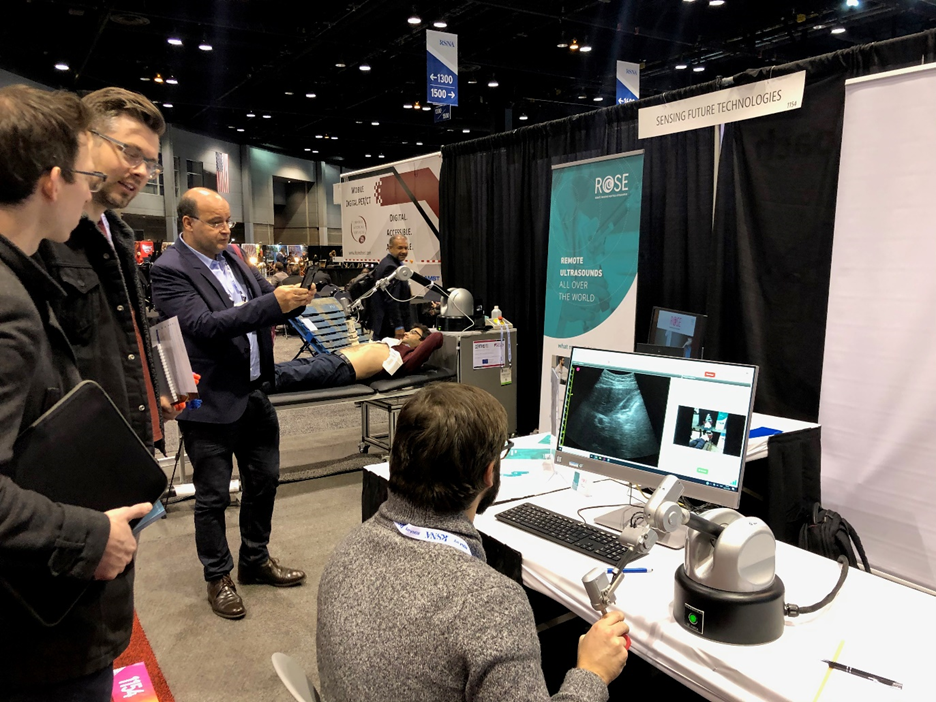
Actualmente, a SFT, tal como estabelecido pelo acordo de Direitos de Propriedade Intelectual (DPI) do projecto ROSE, é o proprietário do sistema ROSE e tem assumido a liderança dos esforços de comercialização. Estes esforços incluem a procura de leads comerciais e a participação em conferências. Relativamente a este último ponto, o sistema ROSE já esteve presente (e com feedback positivo) no RSNA (Sociedade Radiológica da América do Norte, a mais prestigiada conferência e feira de radiologia), no MEDICA (a maior feira de tecnologias de saúde) e no SPR (Sociedade Paulista de Radiologia e Diagnóstico, uma importante conferência e feira de radiologia no Brasil). Esta última conferência deu origem a oportunidades de negócio para a compra e implantação do sistema ROSE nos hospitais no Brasil.
Recent Comments