
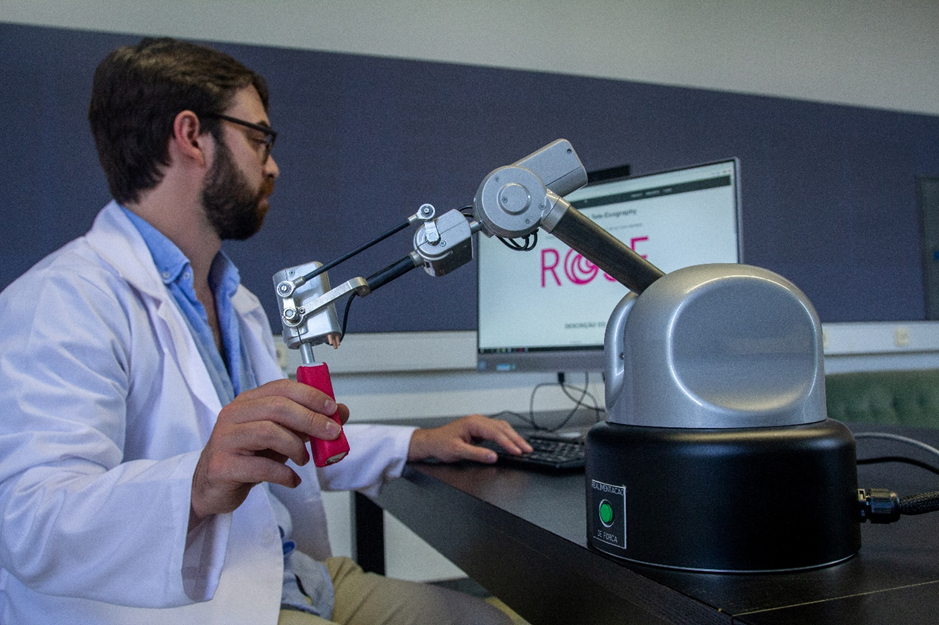
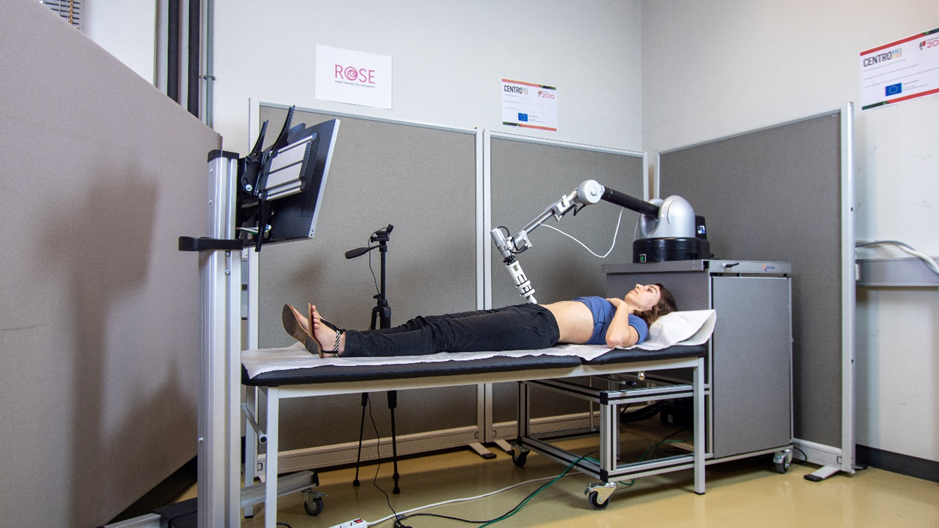
El sistema ROSE, forma abreviada de Robot Sensing para Tele-Ecografía, es una solución tecnológica novedosa que permite procedimientos de diagnóstico por imágenes de ultrasonido abdominal y pélvico en una configuración completamente remota. El sistema está compuesto por una red de estaciones de trabajo para pacientes y médicos (actualmente una de cada uno) que están equipadas con robots colaborativos ultraligeros. A través de la estación de trabajo del médico, el radiólogo puede controlar de forma remota la sonda de ultrasonido en el lado del paciente y, debido a una arquitectura de control compatible, recibir en su estación de trabajo retroalimentación háptica, que es una fuente fundamental de información para optimizar el rendimiento en las imágenes de ultrasonido. En la estación de trabajo del paciente, junto al brazo manipulador, hay un sistema de visión por computadora, que alimenta la interfaz web médico-paciente, lo que permite la teleconsulta y proporciona una mejor sensación de inmersión para el médico y presencia para el paciente.
Esta tecnología tiene como objetivo proporcionar una herramienta remota eficiente para la planificación médica, reduciendo consultas y viajes innecesarios tanto de médicos como de pacientes. Dicha eficiencia permitirá a los médicos realizar exámenes de ultrasonido a larga distancia, ahorrando tiempo y recursos, y creando un nuevo paradigma de atención médica. Incluso para los pacientes con enfermedades crónicas, el seguimiento y la orientación remotos les permiten realizar viajes cortos, lo que mejora la comodidad y reduce los costes. En los países en desarrollo, permite a los hospitales acceder a especialistas en países desarrollados para proceder a exámenes de larga distancia sin preocupaciones de viaje.
Los conceptos básicos y la tecnología implementada en este sistema tienen sus raíces en la Universidad. La base y la base teórica para las arquitecturas de control y el software implementados en ROSE se han estado gestando durante una década a través del trabajo de investigadores de la Universidad de Coimbra (UC) a través del Instituto de Sistemas y Robótica (ISR-UC), en torque y manipuladores robóticos controlados conformes y visión artificial para aplicaciones en el sector sanitario. Con los conceptos básicos observados, el concepto de tecnología formulado y validado a través de numerosas pruebas de conceptos experimentales, la tecnología había madurado lo suficiente para la siguiente etapa del proceso de transferencia de tecnología.
La creación del prototipo del sistema y la validación en el entorno relevante se llevó a cabo durante el proyecto ROSE, un proyecto financiado a nivel nacional financiado en el marco del programa Portugal 2020. Este proyecto se unió a diferentes socios: ISR-UC proporcionó el trabajo preliminar y la base teórica; El Instituto Pedro Nunes (IPN) a través del Laboratorio de Automatización y Sistemas (LAS) brindó soporte técnico para la implementación e integración del sistema ROSE; Luz Saúde proporcionó la necesidad, los medios y la configuración para la validación y la experiencia médica para complementar el proceso de ingeniería; Sensing Future Technologies (SFT) brindó soporte técnico y los canales para la comercialización futura del producto final ROSE.
Tras el cierre del proyecto, el sistema ROSE se ha desplegado en un hospital de Portugal durante un año. Esto ha permitido la recopilación continua de datos para la validación del sistema en el entorno de trabajo y cubriendo el escenario de caso de uso práctico de realizar un tele-ultrasonido utilizando el sistema robótico teleoperado. Este hospital involucrado en la validación ROSE utilizará la tecnología en su propia práctica tan pronto como se complete la validación clínica. Esta operación generará ingresos para el hospital, de manera similar a los ultrasonidos clásicos, que deberían ser suficientes para cubrir el contrato de mantenimiento con SFT. Por lo tanto, además de un socio, también es el primer cliente líder de los sistemas.
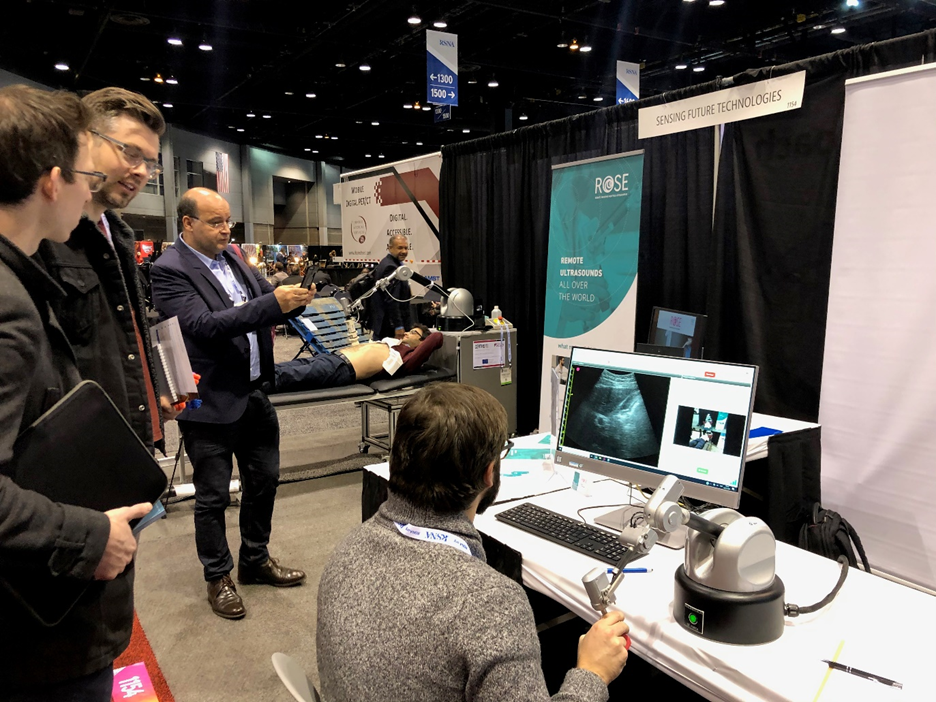
Actualmente, SFT, según lo establecido por el acuerdo de derechos de propiedad intelectual de ROSE, es el propietario del sistema ROSE y ha tomado la iniciativa de los esfuerzos de comercialización. Estos esfuerzos incluyen la búsqueda de oportunidades comerciales y la participación en conferencias. Respecto a este último punto, el sistema ROSE ya ha estado presente (y con comentarios positivos) en RSNA (el congreso y feria más prestigiosa de radiología), en MEDICA (la mayor feria de tecnologías sanitarias) y en SPR (un importante congreso y feria de radiología en Brasil). Esta última conferencia ha generado pistas comerciales para la compra y despliegue del sistema ROSE en hospitales de Brasil.
Recent Comments